The Elixir Telescope
Part 5 : Porting the depth of field simulation to Elixir + Rust
Entries up to this point :
- Part 4 : Simulating image capture and focusing
- Part 3 : Raytracing a parabolic mirror from scratch
- Part 2 : Primary mirror design & calculation
- Part 1 : Simulating movement & state with Elixir
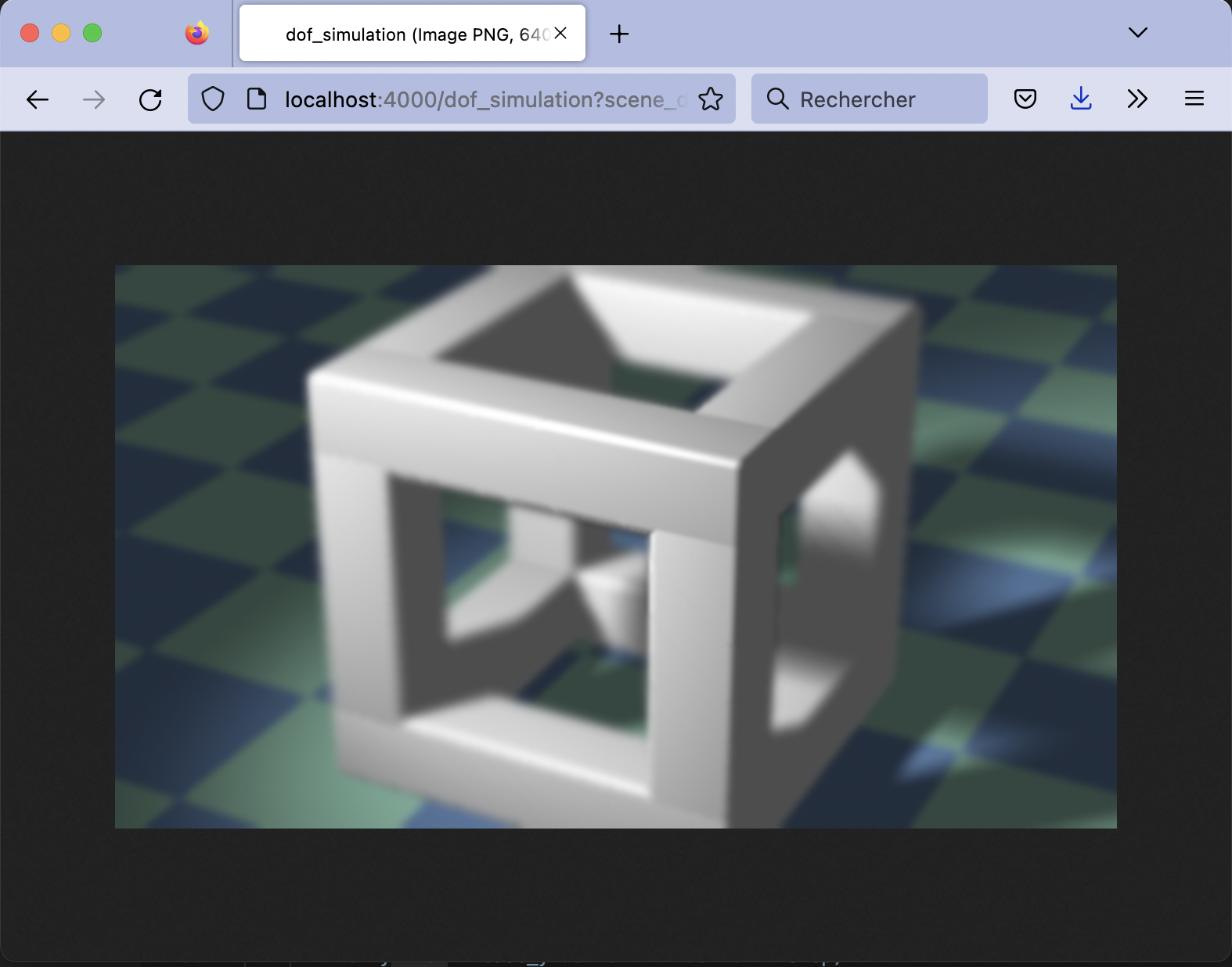
In the last entry, I finished with a plausible depth of field simulation. What counts for me isn’t the physical reality of the values obtained, but the plausibility of the effect of depth of field with a quite-open objective (f/3.51) and short or long object distances.
Since this simulation must run server-side, I ported it to Elixir with Rust and Rustler to speed up the image processing.
First, to avoid loading an image for each simulation request, I created an Agent whose task is to hold a reference to Rust memory.
defmodule Optics.SceneHolder do
use Agent
def get_path() do
Path.join(:code.priv_dir(:scope), "resource/img_n_depth.png")
end
defp initial_state() do
{:ok, ref} = Optics.RxopticsNif.load_image(get_path())
ref
end
def start_link(_) do
Agent.start_link(fn () -> initial_state() end, name: __MODULE__)
end
def get_scene() do
Agent.get(__MODULE__, fn a -> a end)
end
end
Quite straightforward. The work happens in Optics.RxopticsNif.load_image/1, calling a NIF function.
iex(8)> Optics.SceneHolder.get_scene
#Reference<0.2612143773.3884056582.52554>
From the Rust side, we return a reference-counted ResourceArc (see rustler::resource::ResourceArc )
#[rustler::nif]
pub fn load_image(path: String) -> Result<ResourceArc<DepthAndColorMap>, ImageHandlingError> {
match dof::load_image(path) {
Ok(a) => Ok(ResourceArc::new(a)),
Err(_) => Err(ImageHandlingError {
msg: "Failed to load image".to_string(),
}),
}
}
The DepthAndColorMap is a representation of an image where the alpha channel represents depth.
#[derive(Clone, Copy)]
pub struct DepthAndColorPx {
x: u32,
y: u32,
d: u8,
rgba: [u8; 4],
}
#[derive(Clone)]
pub struct DepthAndColorMap {
width: u32,
height: u32,
values: Vec<DepthAndColorPx>,
}
An image is simply loaded, its rgb and alpha values taken separately, and the resulting vector is sorted from back (furthest from the observer) to front.
fn to_depth_and_color_map(a: DynamicImage) -> DepthAndColorMap {
let w = GenericImageView::width(&a);
let h = GenericImageView::height(&a);
let mut depth_and_color_vec = DepthAndColorMap {
width: w,
height: h,
values: vec![],
};
for (x, y, rgba) in a.pixels().into_iter() {
let [r, g, b, a] = rgba.0;
depth_and_color_vec.values.push(DepthAndColorPx {
y,
x,
d: a,
rgba: [r, g, b, 255],
});
}
depth_and_color_vec.values.sort_by(|a, b| a.d.cmp(&b.d));
depth_and_color_vec
}
Then, when requested, the blurred image is computed by passing this reference back to rust.
pub fn blur(
res: rustler::ResourceArc<DepthAndColorMap>,
scene_distance: f64,
sensor_distance: f64,
pxsize: f64,
radius: f64,
base_fl: f64,
) -> Result<Vec<u8>, ImageError> {}
The implementation can be found on GitHub but it’s quite simple.
- Iterate on pixels from the depth and color map
- For each depth value, calculate the real-world distance it represents
- Calculate the resulting blur radius, truncated to 2 decimal places
- Did the blur value change from the previous one ?
- If so:
- Paint the drawing canvas on the blurring canvas
- Blur the blurring canvas
- Paint the blurring canvas on the output canvas
- Else:
- Draw a pixel of the right color on the drawing canvas
- If so:
- After iteration, blur & paint the remaining drawing canvas on the output canvas
Nice ! All the pieces are coming together.